RobotCompass
Plan a treasure hunt with this digital compass.
Compass
The robot has a compass module, which it uses to find its direction. This sketch will make sure the robot goes towards a certain direction.
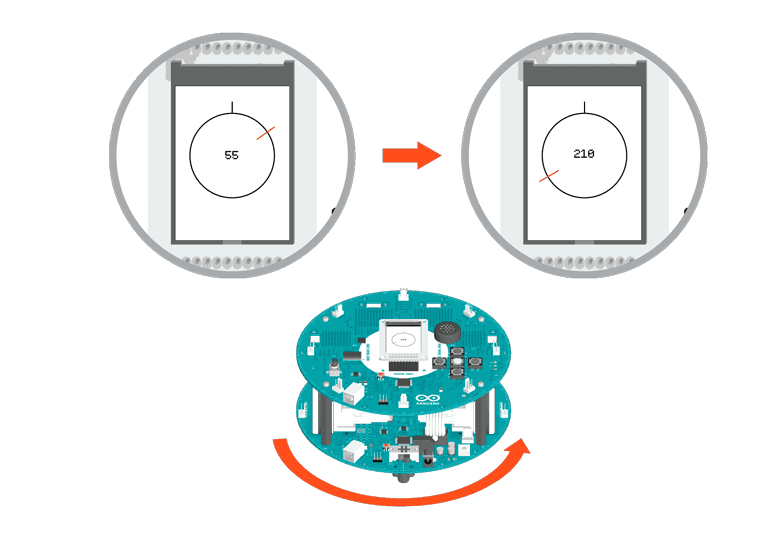
When you hold the robot in your hands and rotate, you will the screen change, indicating direction.
NB : magnets will interfere with the compass. If you're getting unexpected results, check to make sure there are none around.
Hardware Required
- Arduino Robot
Instruction
Upload the example, unplug USB and turn on power.
Place the robot on the ground.
After the starting screen, a graph will appear on-screen, representing the compass
The robot will start moving in a direction (in this example, it will start heading south). If you move it in a different direction, it will turn back to the way it wants to move.
If you want to change the robot's heading, in the code, look for
at the beginning of the code. Change this value to another number, between 0 and 359. 0 represents north, 90 is east, 180 is south, and 270 is west. Where do you want to go?int direc=180
Try it out
Code
1/* Robot Compass2
3 The robot has an on-board compass module, with4
5 which it can tell the direction the robot is6
7 facing. This sketch will make sure the robot8
9 goes towards a certain direction.10
11 Beware, magnets will interfere with the compass12
13 readings.14
15 Circuit:16
17 * Arduino Robot18
19 created 1 May 201320
21 by X. Yang22
23 modified 12 May 201324
25 by D. Cuartielles26
27 This example is in the public domain28
29 */30
31// include the robot library32#include <ArduinoRobot.h>33#include <Wire.h>34
35int speedLeft;36int speedRight;37int compassValue;38int direc = 180; //Direction the robot is heading39
40void setup() {41
42 // initialize the modules43
44 Robot.begin();45
46 Robot.beginTFT();47
48 Robot.beginSD();49
50 Robot.displayLogos();51}52
53void loop() {54
55 // read the compass orientation56
57 compassValue = Robot.compassRead();58
59 // how many degrees are we off60
61 int diff = compassValue - direc;62
63 // modify degrees64
65 if (diff > 180) {66
67 diff = -360 + diff;68
69 } else if (diff < -180) {70
71 diff = 360 + diff;72
73 }74
75 // Make the robot turn to its proper orientation76
77 diff = map(diff, -180, 180, -255, 255);78
79 if (diff > 0) {80
81 // keep the right wheel spinning,82
83 // change the speed of the left wheel84
85 speedLeft = 255 - diff;86
87 speedRight = 255;88
89 } else {90
91 // keep the right left spinning,92
93 // change the speed of the left wheel94
95 speedLeft = 255;96
97 speedRight = 255 + diff;98
99 }100
101 // write out to the motors102
103 Robot.motorsWrite(speedLeft, speedRight);104
105 // draw the orientation on the screen106
107 Robot.drawCompass(compassValue);108}Suggest changes
The content on docs.arduino.cc is facilitated through a public GitHub repository. If you see anything wrong, you can edit this page here.
License
The Arduino documentation is licensed under the Creative Commons Attribution-Share Alike 4.0 license.